本文
「知の拠点あいち重点研究プロジェクトIV期」 産業ロボット向け非接触電力伝送ロータリージョイントを開発! ~電界方式により耐久性向上・軽量化・高効率化を実現しました~
愛知県と公益財団法人科学技術交流財団では、産学行政連携の研究開発プロジェクト「知の拠点あいち重点研究プロジェクトIV期※1」を2022年度から実施しています。
この度、「プロジェクトCore(コア) Industry(インダストリー)※2」の研究テーマ「スマートファクトリーの完全ワイヤレス化に向けた非接触電力伝送」※3において、豊橋技術科学大学の田村(たむら)昌也(まさや)教授、株式会社近藤製作所(蒲郡市)らの研究チームは、電界方式を使った産業ロボット向けの非接触電力伝送ロータリージョイント※4を開発しました。
従来のロータリージョイントは、接触式のスリップリング※5を介して電力供給や信号のやり取りを行うため、ロボットの急激な動作によりノイズや摩耗の影響を受け易いという欠点がありました。今回開発した電界方式の非接触電力伝送ロータリージョイントは、これらの欠点を克服するとともに、軽量化に適していることから、様々な産業ロボット分野において活用が期待されます。
1 開発の背景
現在、日本では人・機械・システムをIoT(Internet of Things)でつなぐことによるスマートファクトリー化が進められています。これにより、生産現場では品質データの収集による品質向上、生産計画や製造の最適化によるコスト削減など、大きな効果を上げ始めています。これまでデータ管理、システム制御、モニタリング等は、IoTやAIの導入によりデジタル化が進んできた一方で、作業の中核を担う産業ロボットには連続駆動による断線という課題が残されています。
産業ロボットの電力供給に非接触電力伝送が導入できれば、上記課題を解決できるとともに、データ管理から電力供給まで全てをデジタル化でき、作業効率向上や24時間連続稼働による生産性の向上が期待できます。製造拠点の日本回帰が始まっている今、非常に重要な技術となります。
2 開発の概要
産業ロボットはワーク(加工対象物)の搬送や製品組立の工程など多くの用途で活躍しています。特にワークを掴むなどの作業にはロボットハンドが使われますが、手首軸の旋回時にハンドに接続されている配線ケーブルが振り回され、断線の原因になります。そのため、ロボットとハンドの間にロータリージョイントを設置して配線ケーブルを省略することにより断線を回避しています。
ロータリージョイントの現在の主流はスリップリングによる接触式で、電力供給と信号のやり取りはスリップリングを介して行われます。しかしながら、この方式はロボットの急激な動作によりノイズが入りやすい、また、摩耗により使用寿命が短くなるといった欠点があります。これらの欠点を克服する方法として、非接触電力伝送(ワイヤレス給電)が研究開発されていますが、伝送機構の軽量化が課題の一つとなっています。
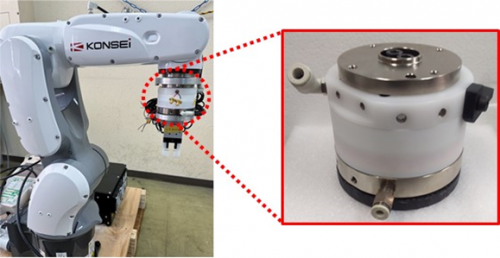
非接触の近距離電力伝送方式には磁界方式と電界方式がありますが、今回、耐久性に優れかつ軽量化にも適した電界方式を使った非接触電力伝送ロータリージョイントを開発しました(図1、2参照)。本開発品は送電側及び受電側を2枚ずつの薄い電極で構成し、さらに電極の構造・配置及びロータリージョイント本体の材料に工夫を加えることにより、軽量化だけでなく高効率化も図っています。これにより、磁界方式に比べて30%減の軽量化と10%アップの高効率化を達成し、総重量500g、RF-RF効率99%のロータリージョイントを実現しました。さらに、このロータリージョイントを用いてワイヤレス給電システムを構築し、電力伝送効率73%、DC電圧24V、出力12Wを達成しました。
この技術の詳細は2024年5月8日(水曜日)から開催される国際会議(2024 IEEE Wireless Power Technology Conference and Expo、開催場所:京都大学宇治キャンパス おうばくプラザきはだホール及び木質ホール(京都府宇治市))にて紹介いたします。
図1 各種近距離給電方式の原理及び特性の比較
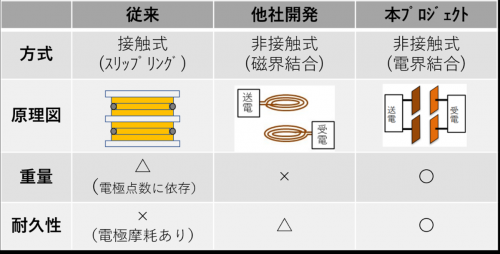
図2 共同開発した送受電器を搭載したロータリージョイント
3 期待される成果と今後の展開
今回開発した非接触電力伝送ロータリージョイントは単純・軽量構造かつメンテナンス性も優良で、安価に製造できる点が魅力であり、工場内の製品製造に関わる数多くのロボットへの適用が期待されます。今後、本開発品の実用化に向けて、送電電力を生成する高周波電源や整流回路などの周辺回路の小型化に取り組む予定です。
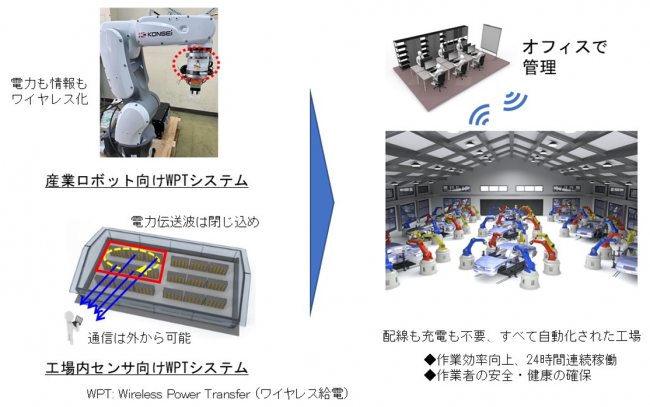
一方、本プロジェクトテーマでは、上述の近距離伝送となる産業ロボット向け非接触給電システム開発と並行して、遠距離伝送となる工場内センサ向け非接触給電システムの開発も進めています。今後、この遠距離伝送システムが完成すれば、工場内の製品製造に関わるロボットから作業環境を管理するセンサまで様々な電気・電子機器に適用できる非接触電力伝送(ワイヤレス給電)の基礎技術が構築されることになり、図3に示すスマートファクトリーの実現に貢献することが期待されます。
図3 ワイヤレス化を実現したスマートファクトリーの姿
4 社会・県内産業・県民への貢献
|
社会への貢献 |
データ管理から電力供給まですべてワイヤレス化でき、作業効率向上や24時間連続稼働の実現による生産性の向上を実現 |
|
県内産業への貢献 |
非接触電力伝送の研究開発拠点として愛知県の高度ものづくり産業を支える基盤を強化 |
|
県民への貢献 |
革新的な産業ロボットの開発とその普及が進むことで、愛知県のシンボルとして活用 |
5 問合せ先
【重点研究プロジェクト全体に関すること】
・あいち産業科学技術総合センター 企画連携部
担当:佐藤、日渡、村上
所在地:豊田市八草町秋合1267番1
電話:0561-76-8306
・公益財団法人科学技術交流財団 知の拠点重点研究プロジェクト統括部
担当:新庄、吉田、村瀬
所在地:豊田市八草町秋合1267番1
電話:0561-76-8380
【本開発内容に関すること】
・豊橋技術科学大学
担当:総務課広報係 岡崎、宮田
所在地:豊橋市天伯町雲雀ヶ丘1-1
電話:0532-44-6506
・株式会社近藤製作所 幸田工場
担当:メカトロ機器営業本部 営業課 課長 小野
所在地:額田郡幸田町深溝(ふこうず)一本樹(いっぽんぎ)11-1
電話:0564-65-0428
【用語説明】
※1 知の拠点あいち重点研究プロジェクト
高付加価値のモノづくりを支援する研究開発拠点「知の拠点あいち」を中核に大学等の研究シーズを活用したオープンイノベーションにより、県内主要産業が有する課題を解決し、新技術の開発・実用化や新たなサービスの提供を目指す産学行政の共同研究開発プロジェクト。2011年度から2015年度まで「重点研究プロジェクトI期」、2016年度から2018年度まで「重点研究プロジェクトII期」、2019年度から2021年度まで「重点研究プロジェクトIII期」を実施し、2022年8月から「重点研究プロジェクトIV期」を実施しています。
「重点研究プロジェクトIV期」の概要
|
実施期間 |
2022年度から2024年度まで |
|
参画機関 |
15大学 7研究開発機関等 88社(うち中小企業59社) (2024年3月時点) |
|
プロジェクト名 |
・プロジェクトCore Industry ・プロジェクトDX ・プロジェクトSDGs |
※2 プロジェクトCore Industry
|
概要 |
世界を牽引して未来を創りつづける愛知の基幹産業の更なる⾼度化に資する技術開発に取組む。 |
|
研究 テーマ |
【研究開発分野】自動車・航空宇宙等機械システム(ハード) 1 スマートファクトリーの完全ワイヤレス化に向けた非接触電力伝送 2 超高効率エレクトロニクスを実現するMBDと融合した革新的素材開発 【研究開発分野】高効率加工・3Dプリンティング 3 金属3D造形技術CF-HMの進化による航空機部品製造用大型ジグの革新 4 積層造形技術の深化によるモノづくり分野での価値創造とイノベーション創出 【研究開発分野】次世代材料・分析評価 5 塗膜/外用剤の次世代分子デザインに向けた3次元可視化法の確立 6 カーボンニュートラル社会実現に向けた先端可視化計測基盤の構築 7 人工シデロフォア技術を用いた大腸菌群検出技術・装置の開発 8 高機能複合材料CFRPの繊維リサイクル技術開発と有効利用法 9 ナノ中空粒子を用いた環境対応建材の研究開発 |
|
参画 機関 |
7大学 3研究開発機関等 35社(うち中小企業22社) (2024年3月時点) |
※3 スマートファクトリーの完全ワイヤレス化に向けた非接触電力伝送
|
概要 |
スマートファクトリー化を実現するという目的を達成するため、近距離伝送となる産業用ロボット向け非接触給電システムと遠距離伝送となる工場内センサ向け非接触給電システムを並行して開発する。 |
|
研究リーダー |
豊橋技術科学大学 教授 田村 昌也 氏 |
|
事業化リーダー |
株式会社近藤製作所 専務取締役 近藤 康正 氏 |
|
参加機関 (五十音順) |
〔企業〕 株式会社近藤製作所(蒲郡市)、株式会社コンメックス(額田郡幸田町)、 株式会社ソーホーエード(岡崎市)、株式会社パワーウェーブ(豊橋市)、 株式会社村田製作所(京都府長岡京市) 〔大学〕 国立大学法人豊橋技術科学大学(豊橋市) 〔公的研究機関〕 あいち産業科学技術総合センター(豊田市)、 公益財団法人科学技術交流財団(豊田市) |
※4 ロータリージョイント
電気や信号を伝達する回転継手のことです。
※5 スリップリング
静止体側(ステータ)と回転体側(ロータ)に分けられ、ステータにブラシがあり、ロータにリングがある構造で、静止体から回転体に対して電力と電気信号を伝達する回転部品です。
このページに関する問合せ先
あいち産業科学技術総合センター企画連携部
企画室(担当:佐藤、日渡、村上)
豊田市八草町秋合1267-1
電話:0561-76-8306
